- 您现在的位置:买卖IC网 > Sheet目录478 > MMA6826AKW (Freescale Semiconductor)IC ACCELEROMETER XY AXIS 16QFN
�� �
�
�4.2�
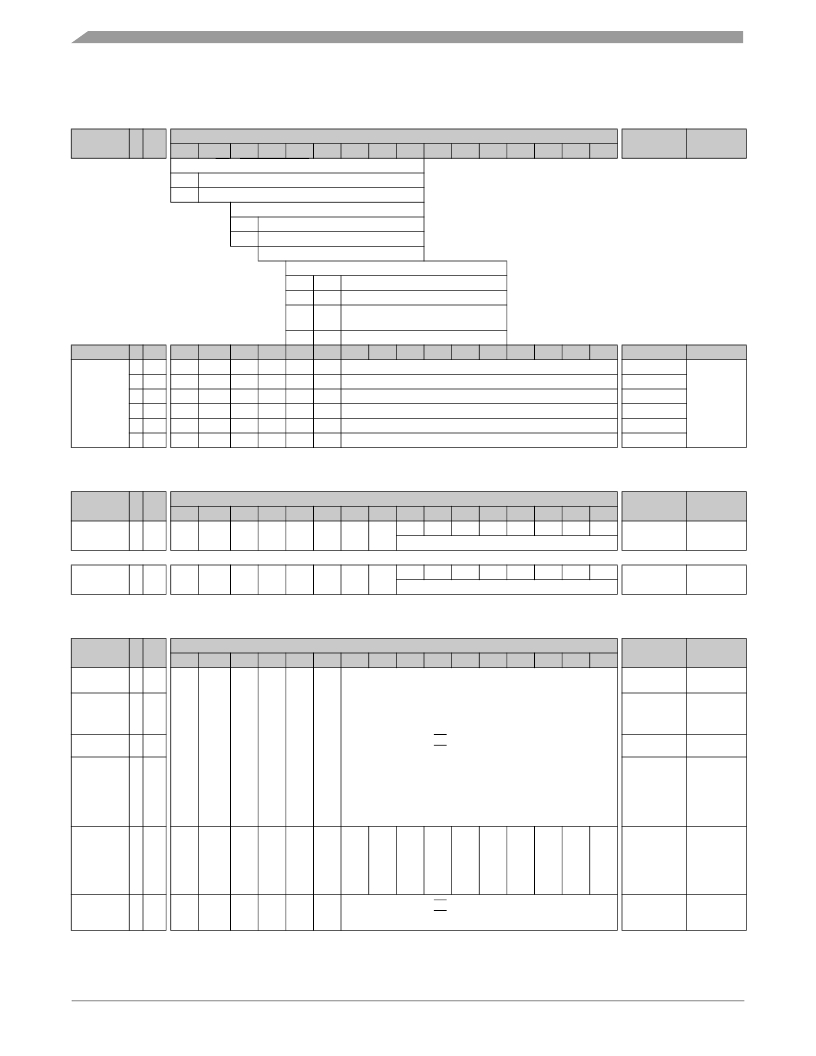
�SPI� Response� Format�
�Table� 30.� SPI� Response� Message� Summary�
�MSB�
�LSB�
�15�
�14�
�13�
�12�
�11�
�10�
�9�
�8�
�7�
�6�
�5�
�4�
�3�
�2�
�1�
�0�
�CMD�
�A� AX�
�OC�
�0�
�AX�
�P�
�S1�
�Response� to� Valid� Acceleration� Request�
�S0� D9� D8� D7� D6� D5�
�D4�
�D3�
�D2�
�D1�
�D0�
�Data� Type�
�Reference�
�OC� =� Offset� Cancelled� Data� Requested�
�0�
�1�
�Transferred� Accel� Data� is� Offset� Cancelled� Data�
�Transferred� Accel� Data� is� Raw� Data�
�AX� =� Axis� Requested�
�0�
�1�
�X-Axis� Acceleration� Data� Response�
�Y-Axis� Acceleration� Data� Response�
�P� =� Odd� Parity�
�S[1:0]� =� Device� Status�
�0�
�0�
�1�
�1�
�0�
�1�
�0�
�1�
�In� Initialization� (ENDINIT� =� ’0’)�
�Normal� Data� Request�
�ST� Active,� ΣΔ� /Offset� Over� range�
�Present�
�Internal� Error� Present� /� SPI� Error�
�CMD�
�A� AX�
�OC�
�0�
�AX�
�P�
�S1�
�S0�
�D9�
�D8�
�D7�
�D6�
�D5�
�D4�
�D3�
�D2�
�D1�
�D0�
�Data� Type�
�Reference�
�1�
�0�
�OC�
�0�
�0�
�P�
�0�
�1�
�X-� Axis� Acceleration� Data�
�Accel�
�Valid� Accel�
�1�
�0�
�OC�
�0�
�0�
�P�
�1�
�0�
�X-� Axis� Self-Test� Active� Acceleration� Data�
�Accel�
�Data�
�Request�
�1�
�1�
�1�
�1�
�0�
�1�
�1�
�1�
�OC�
�OC�
�OC�
�OC�
�0�
�0�
�0�
�0�
�0�
�1�
�1�
�1�
�P�
�P�
�P�
�P�
�0�
�0�
�1�
�0�
�0�
�1�
�0�
�0�
�X-� Axis� Acceleration� Data,� Initialization� in� Process� (ENDINIT=’0’)�
�Y-Axis� Acceleration� Data�
�Y-Axis� Self-Test� Active� Acceleration� Data�
�Y-� Axis� Acceleration� Data,� Initialization� in� Process� (ENDINIT=’0’)�
�Accel�
�Accel�
�Accel�
�Accel�
�Section� 4.3�
�MSB�
�LSB�
�15�
�14�
�13�
�12�
�11�
�10�
�9�
�8�
�7�
�6�
�5�
�4�
�3�
�2�
�1�
�0�
�CMD�
�A� AX�
�D15�
�D14�
�AX�
�P�
�D11�
�Response� to� Valid� Register� Access�
�D10� D9� D8� D7� D6� D5�
�D4�
�D3�
�D2�
�D1�
�D0�
�Data� Type�
�Reference�
�Register�
�Write�
�0�
�1�
�0�
�0�
�1�
�P�
�1�
�1�
�1�
�0�
�D7�
�D6�
�D5� D4� D3� D2�
�New� Contents� of� Register�
�D1�
�D0�
�Register� Write� Section� 4.4.1�
�Register�
�Read�
�0�
�0�
�0�
�1�
�0�
�P�
�1�
�1�
�1�
�0�
�D7�
�D6�
�D5� D4� D3� D2�
�Contents� of� Register�
�D1�
�D0�
�Register�
�Read�
�Section� 4.4.2�
�MSB�
�LSB�
�15�
�14�
�13�
�12�
�11�
�10�
�9�
�8�
�7�
�6�
�5�
�4�
�3�
�2�
�1�
�0�
�CMD�
�A� AX�
�D15�
�D14�
�AX�
�P�
�D11�
�D10�
�Error� Responses�
�D9� D8� D7�
�D6�
�D5�
�D4�
�D3�
�D2�
�D1�
�D0�
�Data� Type�
�Reference�
�Invalid� Accel�
�Request�
�Internal�
�Error�
�Present�
�x�
�x�
�x�
�x�
�Register� Setting�
�Mismatch�
�IDE� Bit� Set�
�(Excl.� Self-Test),�
�DEVINIT� Bit� Set�
�DEVRES� Bit� Set�
�Section� 4.3�
�Section� 4.5.5�
�MISO� Error�
�x�
�x�
�0�
�0�
�0�
�P�
�1�
�1�
�SD� =� 1:� 00� 0000� 0000�
�SD� =� 0:� 10� 0000� 0000�
�MISO� Error� on�
�Previous� Msg�
�Section� 4.5.2�
�MOSI� Parity�
�CMD� Bit� 15� =� 1�
�SPI� Error�
�x�
�x�
�SPI� Timing� Err�
�SPI� Mismatch�
�Section� 4.5.1�
�Err�
�SPI� Protocol�
�Errs�
�Invalid� Reg�
�Invalid�
�Register�
�Request�
�0�
�x�
�0�
�0�
�0�
�0�
�1�
�1�
�1�
�0�
�0�
�0�
�0�
�0�
�0�
�0�
�0�
�0�
�Addr,�
�Write� while�
�ENDINIT� set,�
�Write� to� R/O�
�Section� 4.4�
�Reg�
�Self-Test�
�Error�
�0�
�x�
�0�
�0�
�1�
�P�
�1�
�1�
�SD� =� 1:� 00� 0000� 0000�
�SD� =� 0:� 10� 0000� 0000�
�IDE� Bit� set�
�due� to� Self-�
�Test� Error�
�Section� 4.5.5�
�MMA68xx�
�Sensors�
�46�
�Freescale� Semiconductor,� Inc.�
�发布紧急采购,3分钟左右您将得到回复。
相关PDF资料
MMA6854KW
IC ACCELEROMETER X AXIS 16QFN
MMA7331LR2
ACCELEROMETER 4G XYZ ENH 14-LGA
MMA8451QT
IC ACCELEROMETER 3AXIS 16QFN
MMA8452QR1
IC ACCELER 2G/4G/8G 3AXIS 16QFN
MMA8453QR1
IC ACCELER 2G/4G/8G 3AXIS 16QFN
MMBF0201NLT1
MOSFET N-CH 20V 300MA SOT-23
MMBF170-7
MOSFET N-CH 60V 500MA SOT23-3
MMBF170LT1
MOSFET N-CH 60V 500MA SOT-23
相关代理商/技术参数
MMA6826AKWR2
功能描述:加速计 - 板上安装 XY-AXIS 60/ 60G RoHS:否 制造商:Murata 传感轴:Double 加速:12 g 灵敏度: 封装 / 箱体: 输出类型:Analog 数字输出 - 位数:11 bit 电源电压-最大:5.25 V 电源电压-最小:4.75 V 电源电流:4 mA 最大工作温度:+ 125 C 最小工作温度:- 40 C
MMA6826BKW
制造商:FREESCALE 制造商全称:Freescale Semiconductor, Inc 功能描述:Dual-Axis SPI Inertial Sensor
MMA6826BKWR2
制造商:FREESCALE 制造商全称:Freescale Semiconductor, Inc 功能描述:Dual-Axis SPI Inertial Sensor
MMA6826KW
功能描述:加速计 - 板上安装 XY-AXIS 60/ 60G QFN RoHS:否 制造商:Murata 传感轴:Double 加速:12 g 灵敏度: 封装 / 箱体: 输出类型:Analog 数字输出 - 位数:11 bit 电源电压-最大:5.25 V 电源电压-最小:4.75 V 电源电流:4 mA 最大工作温度:+ 125 C 最小工作温度:- 40 C
MMA6826KWR2
功能描述:加速计 - 板上安装 XY-AXIS 60/ 60G QFN RoHS:否 制造商:Murata 传感轴:Double 加速:12 g 灵敏度: 封装 / 箱体: 输出类型:Analog 数字输出 - 位数:11 bit 电源电压-最大:5.25 V 电源电压-最小:4.75 V 电源电流:4 mA 最大工作温度:+ 125 C 最小工作温度:- 40 C
MMA6827BKW
功能描述:加速计 - 板上安装 XY-AXIS 120/120G QFN RoHS:否 制造商:Murata 传感轴:Double 加速:12 g 灵敏度: 封装 / 箱体: 输出类型:Analog 数字输出 - 位数:11 bit 电源电压-最大:5.25 V 电源电压-最小:4.75 V 电源电流:4 mA 最大工作温度:+ 125 C 最小工作温度:- 40 C
MMA6827BKWR2
功能描述:加速计 - 板上安装 XY-AXIS 120/120G QFN RoHS:否 制造商:Murata 传感轴:Double 加速:12 g 灵敏度: 封装 / 箱体: 输出类型:Analog 数字输出 - 位数:11 bit 电源电压-最大:5.25 V 电源电压-最小:4.75 V 电源电流:4 mA 最大工作温度:+ 125 C 最小工作温度:- 40 C
MMA6827KW
功能描述:加速计 - 板上安装 XY-AXIS 120/120G QFN RoHS:否 制造商:Murata 传感轴:Double 加速:12 g 灵敏度: 封装 / 箱体: 输出类型:Analog 数字输出 - 位数:11 bit 电源电压-最大:5.25 V 电源电压-最小:4.75 V 电源电流:4 mA 最大工作温度:+ 125 C 最小工作温度:- 40 C